1249 浏览由于对软机器人的兴趣增加,对软导电材料的需求有所增加。因此,研究人员努力实现简单、快速且具有成本效益的制造方法。评估材料的机械性能需要进行拉伸试验。然而,机电拉伸测试的可用性来评估机电性能的质量可拉伸导电材料尚未广泛商业化。这种情况阻碍了柔软且可拉伸的导电材料的发展。在这里,我们为柔软和可拉伸材料开发了一种定制的机电拉伸测试。我们使用 Python 软件集成了三个独立的设备,并提供了图形用户界面 (GUI),便于设备的操作。我们希望我们定制的机电拉伸测试将有助于软机器人技术的进步,特别是软和可拉伸传感器。此外,我们的机电装置可以帮助开发实验室设备和了解可拉伸导电材料的机电特性。

导电弹性体机电特性软机器人软传感器拉伸试验规格表。
| 硬件名称 | 可拉伸导电材料机电拉伸试验设备 |
| 学科领域 | 工程与材料科学 |
| 硬件类型 | 测量物理特性和实验室传感器 |
| 最接近的商业模拟 | 拉伸试验机加上材料的电性能。专用于软导电材料 |
| 开源许可证 | 知识共享署名-相同方式共享 4.0 国际许可 (CC BY-4.0) |
| 硬件成本 | 10,311 美元 |
| 源文件存储库 | http://dx.doi.org/10.17632/rckgk7gz5m.1 |
由于可穿戴设备[1]、[2]、[3]、生物医学[4]、[5]、[6]、医疗保健[7]、[8]等潜在应用,Sott 机器人在不同领域受到越来越多的关注, [9]和其他人机软机界面。已经进行了基础研究以支持软机器人技术的进步。例如,对软致动器的研究(例如,介电弹性体致动器(DEA) [10]、[11]、[12]、[13]、软电粘附[14], [15] , [16] , [17]和可伸缩泵[18] , [19] , [20] ) 提供了对它们特性的基本了解。开发软机器人的主要策略涉及软材料工程的创新,包括材料合成、制造和机械设计[21] 。然而,一个主要障碍是整个身体,包括电路,必须是可弯曲、可扭曲和可拉伸的。因此,导电和可拉伸材料至关重要。
随着人们对软机器人的兴趣日益浓厚,对柔性导电材料的需求也在增加。已经付出了很多努力来发现用于柔性导电材料的快速、可靠和具有成本效益的制造方法。例如,可拉伸传感器已使用与 Ecoflex [22] 、3D 打印 [23]和离子液体混合的炭黑 (CB)和用于人体运动监测的离子液体[24]形成。在制造可拉伸传感器时,必须考虑多个方面:机械顺应性、机械特性和电导率的材料。在循环拉伸和高应变条件下不会发生物理变化或损坏的导电材料应该表现出高性能。
为了研究这些特性,应建立用于可拉伸传感器测试的专用设备。采用几种方法来评估可拉伸导电材料的质量。这些包括机械测试、电气性能测试和物理检查。物理检查阐明了可拉伸材料如何导电。例如,可以通过碳纳米管(CNT) 粉末的刷涂法制造 DEA [10] 。研究人员使用市售的场发射扫描电子显微镜了解刷牙如何影响 DEA 质量。由于该设备可在市场上买到,因此很容易进行这种物理检查。另一方面,测试可拉伸导电材料的机械和电气性能更具挑战性,因为同时测量机械性能和电气性能(机电测试)的组合设备在市场上并不广泛。
以前的研究隐含地使用机电设备测试来检查可拉伸传感器的质量和特性。例如,CB-Ecoflex 导电材料使用与 LCR 计相结合的电动载物台进行检查[22] 。他们通过 LabView 控制设备,以评估可拉伸传感器的机电特性。另一个例子是使用 DEA 的刷牙方法开发可拉伸传感器[10]. 他们还使用与 LCR 计同步的拉伸试验机来评估可拉伸导电材料的状况。这两项研究都集中在软传感器和执行器的物理现象上。两者均未提供有关机电设备、设备同步或设备同步代码的详细信息。在这项研究中,我们建立了明确的步骤和方法来设置软可拉伸导电材料的机电拉伸试验设备。我们提供基于 Python 的软件,以便每个研究人员都可以访问该软件并对其进行修改以满足他们的研究需求。这项研究应有助于实验室设备的开发和研究。
所述设备旨在将机械拉伸测试与电气性能测试结合起来。该设备由三个模块组成:线性平台和控制器、LCR 仪表和定制的体重秤。所有这些模块都使用 Python GUI 界面进行集成,以便于操作。图 1描绘了整体机电拉伸测试装置的集成。图1A 描述了控制器和数据采集部分,而图 1B显示了测试条件部分。总的来说,该装置由三个模块(拉力测试仪模块、电学测试仪模块和图形用户界面)组成。每个模块的详细信息如下所述。

拉伸测试仪模块由Optosigma HSC-103线性平台控制器(图1 A1),Optosigma线性平台OSMS-26-300ZSGSP(图1 B1),Optosigma手动可调XY夹具(图1 B7)组成,最大负载为 5 kg 的 Uxcell 称重传感器(图 1 B3)由带有 Arduino-Nano 的 HX711 模块控制(图 1 A3)和 3D 打印材料夹具(图 1B4 和 B6)。线性平台和控制器部分无需任何修改即可使用。我们单独购买了 Optosigma 的 XY 可调夹具,以便在 x 和 y 方向轻松调整夹具的底部。由于 Arduino-Nano 可以使用串行通信进行控制,因此采用带有 Arduino-Nano 的商用称重传感器模块可以轻松地将所有设备与 GUI 集成。该模块中最棘手的部分是设计夹具(图 1 B4 和 B6)。夹持器部分应容纳材料夹持器和导电探头,以监测材料的电阻变化。在这里,我们设计了用于电阻监测的抓手。图 2显示了材料夹持器部分。图2中的孔a 是安装 HIOKI磁力探头。我们使用磁性支架来固定磁性探针和导电材料之间的连接(图 1 B 和2 b)。与其他商业化的拉伸试验机相比,我们的设备价格合理,并支持针对特定目的完全定制的设备安排。
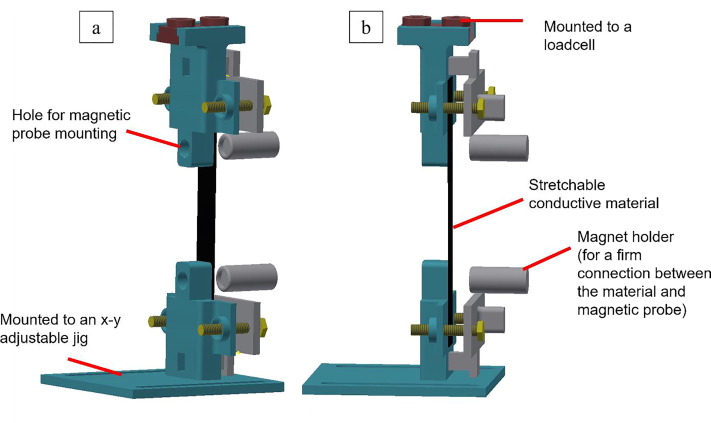
图 2。用于机电拉伸试验设备的材料夹具。
电气测试仪模块由 LCR 仪表 HIOKI 3536(图 1 A4)和磁性探头 HIOKI 9804(图 1 B5)组成。对于机电测试,磁性探头插入夹具安装座(图 2 a)。LCR 仪表具有通用串行总线 (USB) 串行支持,用于 LCR 仪表和个人计算机 (PC) 之间的通信。这允许使用简单的Python 代码控制设备。
在这项研究中,GUI 通过轻松定义适当的变量来帮助研究人员进行实验。我们使用 Python 平台创建了 GUI。图 3显示了进行测量时的整体 GUI。由于该软件是开源软件,研究人员可以根据他们的研究目标轻松访问和开发该软件。此 GUI 中的图表监控侧显示了一些信息,例如,电阻、电压、电流、线性平台的位移和张力。在此 GUI 中,张力和位移分别以克和毫米为单位。应变和抗拉强度可以使用电子表格软件从原始数据手动转换。

图 3。拉伸试验设备的图形用户界面。
该系统集成的目标是同时测量机械和电气性能。该实验装置可能有助于开发用于软传感器、软执行器和软电路的软和可拉伸导电材料。我们的制造方法对于对以下主题感兴趣的研究人员很有用:
柔性电子产品:电路必须由即使在高应变条件下也能导电的柔性材料组成。这种机电拉伸测试可以帮助阐明可拉伸导电材料在应变条件下的基本特性。
软机器人:高性能可拉伸传感器对于提供人类和软机器人之间的接口是必要的。此外,这种机电测试装置可以帮助研究人员了解可拉伸传感器的基本性能特征。
软材料工程:拉伸试验设备可同时进行电气和机械试验。该设备适用于软材料拉伸试验。该设备还可以帮助表征聚合物或橡胶(循环和一次性拉伸测试)。
定制实验室实验:该设备可在市场上购买并单独出售。任何研究人员都可以设置这种拉伸测试设备。与其他专业的拉力测试机相比,价格合理。并且,设备可以根据用户的要求进行定制和布置。
表 1。设计文件名和摘要。
| 设计文件名 | 文件类型 | 开源许可证 | 文件位置 |
|---|---|---|---|
| 夹持器(磁性支架、上侧和下侧) | CAD 文件 | 抄送-4.0 | (文件夹:Gripper 3D 文件) http://dx.doi.org/10.17632/rckgk7gz5m.1 |
| Python GUI软件界面 | Python 程序文件 | 抄送-4.0 | (文件夹:软件GUI(python软件)) http://dx.doi.org/10.17632/rckgk7gz5m.1 |
| 用于称重传感器的 Arduino 程序 | Arduino程序 | 抄送-4.0 | (文件夹:Loadcell-Arduino 软件) http://dx.doi.org/10.17632/rckgk7gz5m.1 |
| 设备安装流程 | 字文件 | 抄送-4.0 | (文件夹:驱动程序列表) http://dx.doi.org/10.17632/rckgk7gz5m.1 |
| GUI软件设置电影(电影S1) | 抄送-4.0 | (文件夹:电影 S1) http://dx.doi.org/10.17632/rckgk7gz5m.1 |
表 2。材料清单。
| 代号 | 零件 | 数字 | 单位货币成本 | 总成本-货币 | 材料来源 | 材料种类 |
|---|---|---|---|---|---|---|
| 线性平台 (图 1 B1) | OSMS-26-300(Z) SGSP | 1 | 1,765 美元 | 1,765 美元 | https://jp.optosigma.com/ | 金属 |
| 线性平台控制器 (图 1 A1) | HSC-103 | 1 | 2,621 美元 | 2,621 美元 | https://jp.optosigma.com/ | 金属 |
| Arduino-Nano (图 1 A3) | Arduino-纳米 | 1 | 25 美元 | 25 美元 | https://www.amazon.co.jp/ | 电子产品 |
| LCR 仪表 (图 1 A4) | IM3536 | 1 | 4,194 美元 | 4,194 美元 | https://www.hioki.com | 电子产品 |
| Z 支架 (图 1 B2) | ZBR-8060 | 1 | 34 美元 | 34 美元 | https://jp.optosigma.com/ | 金属 |
| 来自 Uxcell 的称重传感器 5 kg 和 HX711 (图 1 B3) | 称重传感器和HX711 | 1 | 12 美元 | 12 美元 | https://www.amazon.co.jp/ | 金属和电子 |
| 夹持器 (图 1 B4 和 B6) | 磁性支架,上侧和下侧 | 1 | 3 美元 | 3 美元 | 3D打印零件 | 聚乳酸 (PLA)(3D 打印材料) |
| 磁性探头 (图 1 B5) | 日木 9804 | 1 | 58 美元 | 58 美元 | https://www.amazon.co.jp/ | Meral和塑料 |
| XY 夹具(图 1 B7) | TSD-10162SR | 1 | 1,310 美元 | 1,310 美元 | https://jp.optosigma.com/ | 金属 |
| 面包板 (图 1 B8) | OBC-4545 | 1 | 282 美元 | 282 美元 | https://jp.optosigma.com/ | 金属 |
| 转换垫片 (图 1 B9) | SP-102–2 | 1 | 9 美元 | 9 美元 | https://jp.optosigma.com/ | 金属 |
拉力测试设备的组装过程需要以下部件:线性平台、线性平台控制器、Z支架、面包板、转换垫片、XY夹具和3D打印夹具。我们购买了所有这些零件并在没有任何修改的情况下使用它们。我们使用 Autodesk Inventor 为学生设计了用于软材料拉伸测试的夹持部件,并使用 3D 打印机(3D raise Pro 2)打印出来。由于所有零件都按原样使用,因此组装过程很简单,只需以下步骤。首先,将转换垫片用螺栓固定在面包板上。其次,将线性平台用螺栓固定到转换垫片上。第三,将 XY 夹具用螺栓固定在线性平台前面的面包板上,如图所示图 1 B. 第四,将 Z 支架放在移动平台的线性平台上。至此,我们的拉力测试仪几乎准备就绪。要完成设备,请将称重传感器用螺栓固定到 Z 支架上。最后将上夹具安装在称重传感器上,将下夹具安装在 XY 夹具上。现在拉伸测试仪部分已经完成。
要控制拉伸测试仪部件并获取拉伸位移和拉伸强度的数据,请将线性平台连接到线性平台控制器 (HSC-103)。然后通过 USB 端口将 HSC-103 连接到 PC。现在可以使用我们的 Python GUI 控制线性阶段(图 3 )。接下来,通过将称重传感器与 HX711 和 HX711 与 Arduino-Nano 连接来激活称重传感器读数。此称重传感器模块是一个自己动手 (DIY) 套件,Arduino库已经支持该套件。因此,安装很简单。首先,将传感器线连接到 HX711 上,接线图见表 3。然后按照表 3将 HX711 连接到 Arduino-Nano. 要获取拉伸强度数据,请将 Arduino-Nano 连接到个人计算机并使用我们的 Python GUI 读取数据。这样就完成了拉伸测试仪的组装。
要获取电气数据,请将磁性探头(HIOKI 9804) 插入 3D 打印夹具上侧和下侧提供的孔中。磁性探头应与夹具表面对齐。接下来,将磁性探头连接到 LCR 仪表。将 LCR 仪表连接到计算机。这样就完成了机电拉伸测试仪的组装。最后,将 Arduino-Nano、LCR 仪表和线性平台控制器连接到计算机,并启动提供的 Python GUI 来控制和读取数据。图 1显示了最终的设备布置。
提供的 Python GUI 可以控制上述程序集。首先,安装各部分公司提供的所需驱动程序。驱动程序安装的详细过程可在以下存储库中找到,如表 1 (驱动程序列表)所示。接下来,安装称重传感器模块。称重传感器模块是一个基于 Arduino 的模块,安装简单。简而言之,称重传感器模块的安装从安装 Arduino ide 软件和 HX711 库开始。之后,将提供的程序上传到 Arduino 板。有关 Arduino 程序的软件上传和安装的详细信息,请参见表 1中的存储库(Driver List 文件夹和 Loadcell-Arduino Software 文件夹中提供的 loadcell 的 arduino 程序)。
表 3。称重传感器模块的连接图。
| 称重传感器到 HX711 | |
|---|---|
| 称重传感器侧 (电缆颜色) | HX711 (引脚名称) |
| 红色的 | E+ |
| 黑色的 | 电子- |
| 白色的 | 一种- |
| 绿色的 | 一个+ |
| HX711 转 Arduino-Nano | |
| HX711 (引脚名称) | Arduino-Nano (引脚名称) |
| 接地 | 接地 |
| DT | A1 |
| SCK | A0 |
| VCC | 5伏 |
安装过程完成后,可以从我们的 Python GUI 中实现控制。我们的 Python GUI 发送每个部件供应商提供的命令。在 LCR 仪表中,供应商提供命令代码来获取 HSC-103 的数据等。对于称重传感器模块,我们编写命令是因为读取称重传感器的程序很简单。在称重传感器模块中,我们分别使用命令代码“a”和“b”进行数据读取和皮重缩放。然后设备控制首先安装必要的 Python 库,如表 1中的存储库中所述(文件夹名称为 Software GUI(python 软件))。安装必要的 Python 库后,通过运行 start.py 文件启动 GUI(所有程序指令都在表 1的存储库中)(文件夹名称是 Software GUI(python 软件))。打开程序后,必须设置连接端口(图 4)。选择 LCR 仪表、HSC 103 和称重传感器模块的端口。然后单击连接到每个选项卡并关闭此步骤。GUI 为两个线性平台控制器提供控制:HSC 103 和 SHOT 702。这两个控制器还与 OSMS 26 300(Z) 兼容。因此,SHOT 702 或 HSC 103 可用于控制 OSMS 26 300(Z)。

图 4。机电设备GUI 控件的主屏幕。
图 5显示了设备设置选项卡,从 LCR 仪表(图 5 a)、称重传感器(图 5 b)和线性平台控制器选项卡(图 5 c)开始。在 LCR 仪表选项卡中,可以选择许多变量。从电阻或任何其他变量(例如电容或阻抗)开始。通过在下拉菜单中选择 4 可以同时选择四个变量。称重传感器选项卡很简单,因为它可以分别通过选中或取消选中启用设备的框来包含或排除设备。定零按钮用于给秤去皮(即,将当前重量设置为参考)。然后在线性载物台选项卡上,首先,通过单击红色圆圈按钮设置线性载物台的零位(图 5C)。然后会出现一个新窗口,如图5 c 所示。可以调整位置,然后单击归零,将当前位置设置为零。然后决定测试方法是一步法,一次拉伸试验的多步方式,还是循环拉伸试验。接下来,确定拉伸试验的最大位移和循环次数(如果是循环试验)。如果循环之间有间隔,请添加此参数。此外,设置拉力测试仪的拉伸速度。在接下来的步骤中,我们再次导航到欢迎选项卡(不关闭任何选项卡)并单击“打开运行配置”(图 6)。在运行配置中,定义保存原始数据的位置、测量间隔以及是否实时显示图形。完成这些设置后,再次导航到欢迎选项卡,然后单击最后一步第四步(图 4)以开始控制设备或单击菜单栏上的绿色三角形按钮。(影片 S1 显示了详细的设置过程。影片 S1 在表 1的存储库中可用。

图 5。设置测试设备的变量。A. LCR 仪表选项卡,b。称重传感器选项卡,和 c。线性舞台控制选项卡。

图 6。运行配置选项。
本章使用上一节中的设置演示了用于测试可拉伸导电材料的机电拉伸测试。实验装置如图1 B 所示。我们之前对我们的设备进行了数百次可拉伸导电弹性体的循环测试,发现以 100 毫秒的测量间隔(大约 10 赫兹的数据传输)实现了最稳定的操作设置. 我们还在 10 到 30 mm/s 的不同拉伸速度下测试了设备。测量过程稳定。在本节中,我们展示了从实际测量中获得的数据。图 7显示了以 10 mm/s 的拉伸速度和 100 ms 的采样率获得的导电可拉伸材料的前 25 次循环拉伸测试。
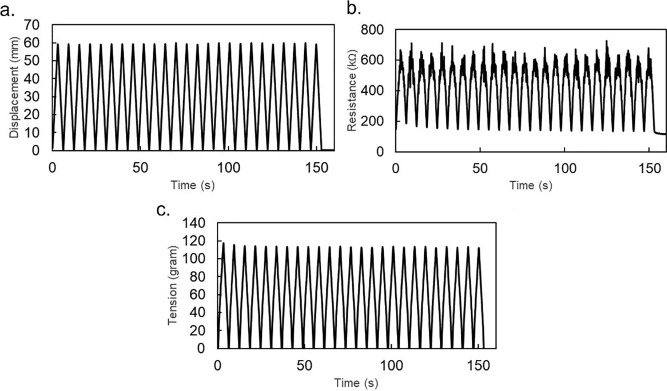
由于数据(图7)是同时获取的,因此可以提取可拉伸导电材料的特性。图 8显示了可拉伸导电材料性能的处理数据。可拉伸传感器的一个重要机电特性是规格因数 (GF)。由于应变变化,GF 类似于传感器的灵敏度。GF 越高,传感器越灵敏。GF 值是通过除以电阻相对变化 ( ΔR/R ) 和传感器的应变变化 ( ε ) 来计算的。从图 8 b 中的样本数据,我们粗略估计 GF 1约为 5 和 GF 2约为 1.5。因为数据是同时采集的,很明显,GF 的降低与传感器的机械性能无关,因为应力-应变数据是线性的,但 GF 值会波动。这种样本数据可能有助于研究人员了解其可拉伸导电材料的特性。我们希望我们的机电测试设备能够帮助软机器人研究人员轻松设置实验设备。

本文集成设备对电气和机械性能进行测试。同时测试机械性能和电性能应该阐明可拉伸导电材料的基本特性。虽然我们的设备是专为软质材料设计的,但通过修改夹持部分,它可以用于硬质材料,如 PVC、碳复合材料或尼龙。此外,我们的设备有可能测量触摸和压力传感器的特性通过修改夹持部分。将线性平台控制器从 HSC-103 更改为 SHOT 702 应该会降低整体价格,因为 SHOT 702 比 HSC103 便宜 1000 美元。我们预计我们的设备将有助于软机器人的发展,尤其是软和可拉伸传感器的发展。



{kind=link}