1326 浏览自动驾驶转向系统是为驱动精准农业中的拖拉机而开发的基本技术之一。在过去的几十年里,这项技术得到了全世界农民社区的良好反响。自动驾驶系统通过辅助操作员在农田作业时进行免提驾驶,减少了对拖拉机驾驶系统的人为干预。它使经营者能够以更有效的投入获得更好的田间绩效运营,同时提高产量并提高农场业务的利润。
根据 Lipinski 等人的说法。[1]自动驾驶系统或自动驾驶系统是多种工具(如照相机、数字分析和图像处理方法)与与卫星导航和计算机化系统相连接的地理定位系统(GPS)的组合。该系统由两个重要组件组成,例如硬件(各种传感器和执行器,例如 GPS 和转向角传感器)和软件(路径规划器、导航控制和转向控制)。自动转向以卫星导航系统的高精度自动控制拖拉机在所需路径内的运动,而不会对植被造成损害,同时保持广泛的测量范围。
考虑到上述功能,自动驾驶拖拉机的直线精度是实现高效现场作业应检查的关键性能指标之一。许多研究人员在过去的研究文献中已经报道了农业作业中的直线精度和自主引导系统的研究。桑托斯等人。[2]例如,通过统计过程控制,以平行度误差和执行误差为基础,采用曲线和直线两种方式(曲线和直线)对花生播种质量进行评价,最大平行度误差分别为 8.75 cm 和 5.22 cm。厘米。云等人。[3]测试了适用于沟灌田的基于立体视觉的引导线检测系统。结果表明,RMSE的横向偏差和航向角分别为0.02 m和0.63°。巴尔多等人。[4]研究了基于安装在车辆中的距离传感器确定的相对位置的自动转向系统。他们发现最大稳态误差为 0.12 m,稳定时间为 7 秒。
崔等人。[5]提出了一种新的引导线提取算法,以提高稻田除草机器人的导航精度。观察到所提出的算法在实验上具有良好的性能,在不同水稻植株大小的情况下具有小于 1° 的高精度。维多维奇等人。[6]比较了霍夫变换和线性回归在作物行检测中的两种方法,能够检测直线和弯曲的作物行。霍夫变换是图像分析、计算机视觉和数字图像处理中使用的特征提取技术之一。图像分割是将数字图像划分为多个区域或像素集的过程。沙拉尔等人。[7]表示智能农业中计算机化使用的几种常用方法,例如卡尔曼滤波器(多传感器数据的稳健数学模型)和霍夫变换。
张等人。[8]基于从视觉系统获取的图像,使用位置聚类算法和最短路径方法在玉米田中使用自动化鲁棒作物行,例如图像分割(使用 RGB 颜色空间)、特征点提取和作物行检测。研究结果表明,该方法的检测精度为 0.5°,优于 Hough 变换的经典方法。苗等人。[9]通过霍尔效应传感器和角度编码器传感器等非接触式绝对角度测量车轮转向角。结果表明,直线的平均误差、误差方差、曲线平均误差和误差方差分别为0.06°、0.215°、0.746°和0.908°。因此,系统与霍尔效应角度传感器之间的误差低于 1°。韩等人。[10]通过 3D 拖拉机驾驶模拟的提议应用进行了模拟研究,用于自动引导耕作操作的基于滑移估计的路径跟踪控制。他们发现,计算机模拟证实了观察者算法在 29 厘米到 15 厘米的范围内,以及弯曲路径上横向偏差的改进性能。
先前发表的关于检查自动驾驶拖拉机直线精度的研究结果似乎对计算要求很高,因为涉及到几种先进的算法和计算的几何概念。它认为这种方法不容易被不熟悉高级算法和几何概念中的术语的用户或农民采用。因此,开发新的替代方法对于为用户或农民带来一系列简单的信息分析程序非常重要。除此之外,新的替代方法有助于丰富研究领域的知识。
本研究旨在启动一种新的简单方法来评估油棕田地形中自动驾驶拖拉机的直线精度。ArcGIS 10.3 版与 Microsoft Excel 软件的组合用于开发新提出的方法。由于油棕是马来西亚最重要的作物,它覆盖了该国最大的农田面积 587 万公顷[11] ,因此特意选择油棕田作为研究区域。. 我们特别选择油棕田作为研究区域,因为作物种植需要广泛的田间作业,例如喷洒、施肥、害虫防治和田间收集,因此,拖拉机在执行这些作业中起着重要作用。另一个原因是,据我们所知,没有人评估过自动驾驶拖拉机在实际油棕地形上的直线精度。
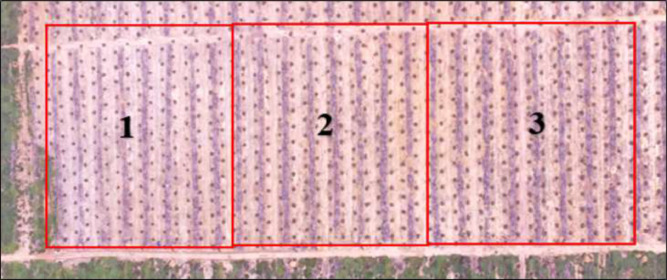
该现场试验是在马来西亚马六甲 Jasin 的 Kempas 庄园的油棕田进行的。研究区位于 N 02⁰15.414” 和 E 102⁰27.718” 的坐标上。该地区地势平坦,地势起伏,平均坡度为 9°,已准备好重新种植油棕。邦戈尔系列是本研究区的主要土壤类型。此类土系为中度风化土,颜色偏黄,以黏土质地为主,母质为砂岩/页岩混合[12]。现场评估在早晨在明亮的光线下进行,天空有点多云。试验田面积为 4.64 公顷(151 mx 307 m),分为 3 个子地块进行复制(图 1 ))。每个子样地有 8 个拖拉机通道,因此,试验期间样地共有 24 个通道。拖拉机沿油棕田常见的机械路径行驶。
纽荷兰TD5.75拖拉机一台(图2 )配备由 Trimble® EZ-Pilot® 转向系统和 Trimble® FmX®2050 Plus 应用程序组成的自动驾驶仪系统的发动机功率为 75 马力,作为本研究的主要组成部分。拖拉机和自动驾驶仪转向部件状况是新的。就连试验的日子也是第一次在田间使用拖拉机和自动驾驶系统。这种自动驾驶转向系统包括一个自动化的 SAM-200 方向盘电机、GPS 制导系统、控制器、调制解调器和数据管理系统,以及一个具有 307 毫米尺寸触摸屏的专用计算机显示系统。对拖拉机在自动驾驶模式下运行时的直线精度进行了评估。田间作业期间自动驾驶拖拉机的导航坐标在 Trimble® FmX®2050 Plus 应用程序(图 3 )。该计算机显示器安装在拖拉机驾驶室上,以便操作员管理系统。通过这个显示,自动驾驶仪系统测量的整个命令很容易设置,并且从现场测量中收集的数据也被简单地记录下来。


拖拉机的通行证由固定在拖拉机系统上的 GPS 记录。我们没有采用实时运动学 (RTK) 来提高 GPS 精度,而是在现场实验过程中完全依赖于拖拉机系统上的嵌入式 DGPS。由于本研究中地形的实际拓扑是平坦到起伏的,因此,如 Vidović 等人所述,当拖拉机在田间采用直线行技术时,通常会出现低凹坑和丘陵。[6]。
田间试验开始时,自动驾驶拖拉机通过手动转向模式跟踪车道,以标记参考坐标。以起点 A 到终点 B 的直线为基准或称为 AB 线。除了该领域的参考外,AB 线还用作控制操作的指南。试验区自动驾驶拖拉机运动AB线示意图如图4所示,田间自动驾驶拖拉机运动形成的典型AB线如图5所示。之后,拖拉机在自动驾驶系统模式下运行,用于测量直线精度误差。沿拖拉机通道的每个坐标点每倾斜 6 秒记录一次。记录坐标点的结果可以在ArcGIS界面中显示。在 ArcMap 工具中,所有记录的坐标点都有自己的“对象 ID”。此对象 ID 记录了允许打开属性表以显示直线精度误差点的坐标数。


ArcGIS ver.10.3 (ESRI, 2013) 和 Microsoft Excel 2016 相结合,开发了评估准确性误差的建议方法。利用带有空间分析扩展功能的ArcGIS软件,利用克里金法生成了用于显示跟踪直线自动驾驶仪的插值图。在 ArcMap 界面中使用 Microsoft Excel 电子表格 (.xls) 作为数据输入,而在 ArcMap 界面的工具箱中使用逗号分隔值 (.csv) 来改变坐标系的形成和变换。该地图将拖拉机在田间行驶时明显的轨道误差可视化。然而,Microsoft Excel 计算了数值数据中轨道的标准偏差 (SD) 和平均标准误差 (SEM) 误差。图 6。

图 6。计算直线精度误差的流程图。
在分析 GIS 地图中的直线误差之前,将收集到的数据准备为“xls”等两种格式。和“csv”。如前所述,“xls”。格式被用作 ArcMap 界面中的数据输入,而 'csv.' 格式用于在 ArcMap 界面的 Toolbox 中改变坐标系的形成和变换。由于来自自动驾驶拖拉机的数据点以纬度和经度坐标记录,因此,“csv.” excel 格式用于将坐标系统转换为马来西亚基准的 Kertau 通用横轴墨卡托 (UTM)。通过这种转换,将记录的经纬度坐标转换为米单位,便于直线误差数据的测量和导出。每个拖拉机通过由 X 轴和 Y 轴组成,
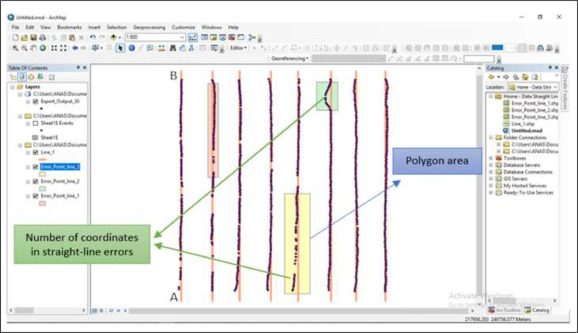
最重要的是,执行ArcMap菜单栏中的“开始编辑”命令,通过识别AB线外的明显轨迹来突出直线精度的误差。识别地图中拖拉机轨道上的明显误差可以计算直线精度的平均误差。在 ArcMap 界面中,根据识别出的 AB 线外明显错误,将沿拖拉机轨道(通道)的弯曲线随机标记为 shapefile 多边形。拖拉机通道 AB 线外共识别出与地图 Y 轴一致的 24 条弯曲线。我们从 24 条弯曲线中抽取 9 条作为样本,用于观察和计算误差,因为它们表明 AB 线之外有明显的误差。采样的弯曲线由 312 个坐标点组成。图 7),并在 ArcGIS 软件中用 shapefile 中的多边形特征突出显示。弯曲线的值被读取为地图中的 X 轴值。将X值所示的弯曲线的平均值作为拖拉机的精度误差值。然后使用 Microsoft Excel 中的标准偏差 (SD) 和平均值标准误差 (SEM) 的公式计算平均误差。计算直线精度平均误差的步骤如图 8 所示。

拖拉机在试验区成功运行。拖拉机在田间穿越的路径以经纬度坐标绘制。该地图还显示了属性表中的坐标。每个坐标点在属性表中都有一个对象 ID。对象ID作为AB直线上的点的误差的例子如图9所示。作为田间拖拉机运动的输出,使用 ArcMap 界面制作了三张地图来显示直线精度的误差。识别出的明显误差是在直线上随机选择的,其特征是在地图上的 AB 线上出现弯曲的线(图 10、图 11和12)。




如图10 所示,在复制 1 中的 AB 线上识别出三个直线精度误差,它们位于多边形 shapefile 中的第 2、5 和 6 通道。而图 11显示了复制 2 中 AB 线的三个直线精度误差,分别位于通道 10、13 和 15。除此之外,图 12指定了复制中 B 线的三个直线精度误差3,位于通道 18、22 和 23。标准差和 (SD.) 和平均值的标准误差 (SEM.) 的不同值代表了笛卡尔 XY 平面中的 Kertau Universal Transverse Mercator (UTM) 值在仪表中的坐标形式作为输出(表1)。
表 1。随机选择复制的直线精度误差。
| 拖拉机通行证 | 直线误差点数 | 直线精度误差 | ||||
|---|---|---|---|---|---|---|
| 标准偏差 (SD) | 平均值的标准误差 (SEM) | |||||
| X 值 | Y 值 | X 值 | Y 值 | |||
| 2 | 46 | 0.276229641 | 13.30684815 | 0.041643185 | 2.006082839 | |
| 5 | 42 | 0.634275435 | 16.4629169 | 0.10028752 | 2.603015717 | |
| 6 | 17 | 0.9147779 | 4.462726 | 0.2361946 | 1.152271 | |
| 10 | 39 | 0.275499331 | 10.87291567 | 0.045291811 | 1.787496325 | |
| 13 | 43 | 0.46493645 | 11.61880723 | 0.07261087 | 1.814552833 | |
| 15 | 38 | 0.237909869 | 9.816464765 | 0.039651645 | 1.636077461 | |
| 18 | 14 | 0.280076 | 3.258023 | 0.080851 | 0.94051 | |
| 22 | 21 | 0.186764 | 5.262141 | 0.042847 | 1.207218 | |
| 23 | 52 | 0.285823 | 12.8965 | 0.040422 | 1.82384 | |
| 平均(米) | 0.39514354 | 9.773038079 | 0.077755515 | 1.663451575 | ||
| 平均(厘米) | 39.5143514 | 977.3038079 | 7.7755515 | 166.3451575 | ||
表 1显示了基于随机选择的复制的直线精度误差。9 个观察样品的拖拉机直线精度平均误差结果为±7.7755515 cm 或约±7.78 cm。如前所述,直线误差是根据弯曲线的平均值指定的,如 SEM 中的 X 值所示。如前所述,本研究中没有使用 RTK 来校正拖拉机的精度,但是,根据 Bergtold 等人的建议,计算的误差在可接受的范围内。[13]谁说,以小于±2.5 cm和±10 cm的精度误差操作自动驾驶拖拉机可能分别为较大的农场和较小的农场带来盈利。伯格托德等人。[13]还报道了不同的自动导航系统或自动驾驶系统与 GPS 也给出了不同的直线精度结果。他们举了一些例子,例如 Trimble® AgGPS® Autopilot™ 差分全球定位系统 (DGPS) 提供了至少 30 厘米的精度,而 Trimble® AgGPS® Autopilot™ 高精度 (HP) 提供了至少 10 厘米的精度。Trimble® AgGPS Autopilot™ Real-Time Kinematics (RTK) 等另一种模型提供了至少 2.5 厘米的精度[13]。Yun等人报道了另一项类似的研究。[3]显示使用 RTK-GPS 的结果为 1.37 cm。
开发了一种新的简单方法,用于轻松描绘自动驾驶拖拉机穿越油棕田地形的直线精度。这种简化的方法结合了基于计算机的现场绘图概念和电子表格软件,可以为用户提供更快的结果。ArcGIS应用程序通过ArcMap接口直接实时生成拖拉机穿越油棕田的直线数据图,Microsoft Excel计算数值数据中的标准差和均值标准差,用于定义直线误差。自动驾驶系统的线路精度。该方法在简化信息分析程序序列以评估自动驾驶拖拉机穿越油棕田的直线精度方面证明了其实用性。它还为那些不熟悉与高级算法和几何概念相关的计算术语的人提供了一个解决方案。新方法使所有这一切成为可能,因为它在数据处理过程中采用了计算要求较低的算法。此外,这种方法简单的另一个因素是使用了常用的应用软件,即 ArcGIS 和 Microsoft Excel,相信很多人已经很熟悉了。
该方法成功评估了自动驾驶拖拉机穿越马来西亚油棕田地形的直线精度误差。自动驾驶拖拉机直线精度计算平均误差为±7.78 cm,在±2.5 cm~±10 cm的可接受范围内,作为自动驾驶拖拉机直线精度的合理误差。综上所述,它具有很大的潜力,可以丰富现有的田间作业自动驾驶拖拉机直线精度评价方法。自动驾驶系统有助于拖拉机操作员在各种现场作业中实现更好的现场性能。然而,建议未来的研究调查环境因素对自动驾驶拖拉机在不同多云条件、地形和田间恶劣条件下在田间作业性能的影响对应用的影响。此外,还建议将这种新方法的精度测量与现有的自动驾驶拖拉机直线精度评估方法进行比较。



{kind=link}